
सिंक्रोनस मोटर | Synchronous Motor
एक सिंक्रोनस मोटर (Synchronous motor) एक मशीन है जो सिंक्रोनस गति से संचालित होती है और विद्युत ऊर्जा को यांत्रिक ऊर्जा में परिवर्तित करती है।
यह मूल रूप से एक मोटर के रूप में संचालित एक अल्टरनेटर है। एक अल्टरनेटर की तरह, एक सिंक्रोनस मोटर में निम्नलिखित दो भाग होते हैं: एक स्टेटर जिसमें स्टेटर कोर के स्लॉट में 3-चरण आर्मेचर घुमावदार होता है और 3-चरण आपूर्ति से बिजली प्राप्त करता है (चित्र 23.1 देखें)।
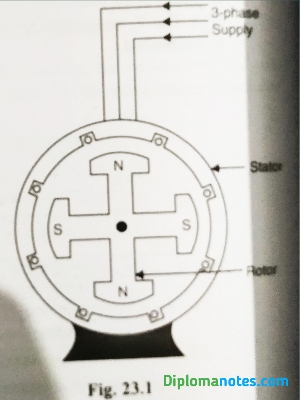
एक रोटर जिसमें मुख्य ध्रुवों का एक सेट होता है जो प्रत्यक्ष धारा से उत्साहित होकर वैकल्पिक N और S ध्रुव बनाता है। रोमांचक कॉइल श्रृंखला में दो स्लिप रिंग से जुड़े होते हैं और रोटर शाफ्ट पर लगे बाहरी एक्सिटर से डायरेक्ट करंट को वाइंडिंग में फीड किया जाता है।
रोटर ध्रुवों के समान संख्या में ध्रुवों के लिए घाव। प्रेरण मोटर के रूप में, ध्रुवों की संख्या मोटर की तुल्यकालिक गति निर्धारित करती है। 120f तुल्यकालिक गति, N, जहाँ f = Hz में आपूर्ति की आवृत्ति P = ध्रुवों की संख्या एक तुल्यकालिक मोटर का एक महत्वपूर्ण दोष यह है कि इसे शुरू करने के लिए सहायक साधनों का उपयोग करना पड़ता है।
यह याद किया जाना चाहिए कि एक डी.सी. जनरेटर को डीसी मोटर के रूप में चलाया जा सकता है। इसी तरह, एक अल्टरनेटर अपनी आर्मेचर वाइंडिंग को 3-फेज आपूर्ति से जोड़कर मोटर के रूप में काम कर सकता है, इसे तब 3 - फेज सिंक्रोनस मोटर कहा जाता है। जैसा कि नाम से ही स्पष्ट है, एक सिंक्रोनस मोटर (synchronous motor) सिंक्रोनस स्पीड (NS = 120f/P) पर चलती है।
गति रोटेशन, इसलिए, स्रोत की आवृत्ति से जुड़ा हुआ है। चूंकि आवृत्ति निश्चित है, मोटर गति सभी भारों पर स्थिर (= तुल्यकालिक गति) बनी रहती है बशर्ते मोटर पर भार सीमित मान से अधिक न हो। यदि मोटर पर भार माइटिंग मान से अधिक हो जाता है, तो मोटर बस आराम करने लगती है और इसके द्वारा विकसित औसत टॉर्क शून्य होता है।
इस कारण से, एक सिंक्रोनस मोटर (synchronous motor) स्वाभाविक रूप से स्वयं शुरू नहीं होती है। इसलिए, सिंक्रोनस मोटर को शुरू करने के लिए, इसे कुछ सहायक माध्यमों से लगभग इसकी तुल्यकालिक गति तक लाया जाता है, 3-कला आपूर्ति को पहले से सिंक्रनाइज़ किया जाता है।
ऑपरेटिंग सिद्धांत
तथ्य यह है कि एक सिंक्रोनस मोटर(synchronous motor) में कोई प्रारंभिक टोक़ नहीं होता है जिसे आसानी से समझाया जा सकता है। एक 3- फेज तुल्यकालिक मोटर पर विचार करें जिसमें दो रोटर पोल N और S हों। फिर स्टेटर भी दो ध्रुवों N और Se के लिए घाव हो जाएगा। मोटर में रोटर वाइंडिंग पर सीधा वोल्टेज लगाया जाता है और स्टेटर वाइंडिंग पर 3-फेज वोल्टेज लगाया जाता है।
स्टेटर वाइंडिंग एक घूर्णन क्षेत्र उत्पन्न करता है जो स्टेटर के चारों ओर तुल्यकालिक गति (= 120 f/P) पर घूमता है। डायरेक्ट (या जीरो फ़्रीक्वेंसी) करंट एक दो-पोल फ़ील्ड सेट करता है जो तब तक स्थिर रहता है जब तक रोटर मुड़ नहीं रहा है। इस प्रकार, हमारे पास एक ऐसी स्थिति है जिसमें घूमने वाले आर्मेचर ध्रुवों की एक जोड़ी मौजूद है और स्थिर रोटर की एक जोड़ी क्यूनोज किसी भी समय, स्टेटर पोल ए और बी की स्थिति में होते हैं जैसा कि चित्र 23.2 में दिखाया गया है।
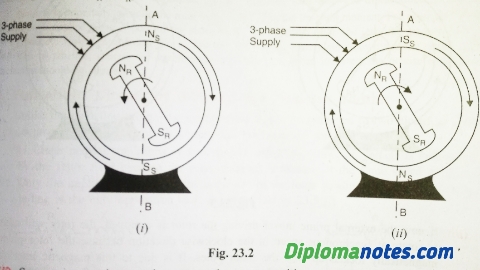
इसलिए, रोटर वामावर्त दिशा में गति करता है। अर्ध-चक्र (या 1/2f = 1/100 सेकेंड) की अवधि के बाद, स्टेटर ध्रुवों की ध्रुवीयताएं उलट जाती हैं लेकिन रोटर ध्रुवों की ध्रुवीयता चित्र 23.2 (ii) में दिखाए गए अनुसार ही रहती है। अब SS और N0 एक दूसरे को आकर्षित करते हैं और इसी तरह N और SP को भी आकर्षित करते हैं। इसलिए, रोटर दक्षिणावर्त दिशा में गति करता है।
चूंकि स्टेटर पोल अपनी ध्रुवीयता तेजी से बदलते हैं, वे रोटर को पहले एक दिशा में खींचते हैं और फिर दूसरे में आधे चक्र की अवधि के बाद। रोटर की उच्च जड़ता के कारण, मोटर चालू नहीं हो पाता है। इसलिए, एक सिंक्रोनस मोटर में कोई सेल्फ-स्टार्टिंग टॉर्क नहीं होता है, यानी एक सिंक्रोनस मोटर (synchronous motor) अपने आप नहीं चल सकती है।
निरंतर यूनिडायरेक्शनल टॉर्क कैसे प्राप्त करें?
यदि रोटर पोल को किसी बाहरी माध्यम से इतनी गति से घुमाया जाता है कि वे स्टेटर पोलो के साथ अपनी स्थिति को बदल देते हैं तो रोटर एक निरंतर यूनिडायरेक्शनल टॉर्क का अनुभव करेगा। इसे निम्नलिखित चर्चा से समझा जा सकता है: मान लीजिए कि स्टेटर क्षेत्र दक्षिणावर्त दिशा में घूम रहा है और रोटर भी कुछ बाहरी माध्यमों से दक्षिणावर्त घूमता है, इतनी गति से कि रोटर पोल स्टेटर पोल के साथ अपनी स्थिति को बदल देता है।
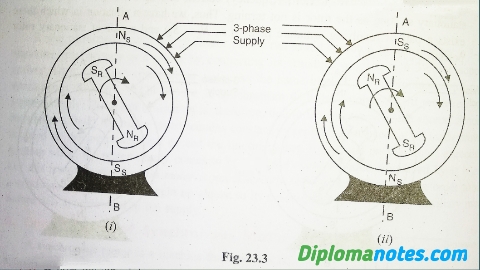
मान लीजिए कि किसी भी पल में स्टेटर और रोटर पोल चित्र 23.3 (i) में दिखाए गए स्थान पर हैं। यह स्पष्ट है कि रोटर पर टॉर्क दक्षिणावर्त होगा। आधे चक्र की अवधि के बाद, स्टेटर पोल अपनी ध्रुवीयता को उलट देते हैं और उसी समय रोटर के ध्रुव भी अपनी स्थिति बदलते हैं जैसा कि चित्र 23.3 (ii) में दिखाया गया है।
परिणाम यह है कि रोटर पर फिर से टोक़ दक्षिणावर्त है। इसलिए, एक निरंतर यूनिडायरेक्शनल टॉर्क रोटर पर कार्य करता है और इसे दक्षिणावर्त दिशा में घुमाता है। इस स्थिति के तहत, रोटर पर ध्रुव हमेशा स्टेटर पर विपरीत ध्रुवता के ध्रुवों का सामना करते हैं और उनके बीच एक मजबूत चुंबकीय आकर्षण स्थापित होता है। यह पारस्परिक आकर्षण रोटर और स्टेटर को एक साथ बंद कर देता है और रोटर वस्तुतः खींचता है।
इन्हे भी पढ़ें -